“I can’t remember a time when I wasn’t into robots” reflects Jake Abbott, mechanical engineering associate professor at the University of Utah. “Whether it was Luke Skywalker’s artificial hand in The Empire Strikes Back, or the robotic suit that Ripley wears in Aliens, I was always intrigued by robots that extend human capabilities. But who isn’t intrigued by robots?”
That fascination carved a path from Abbott’s hometown of West Jordan, Utah, to his mechanical engineering B.S. from Utah State University and his mechanical engineering M.S. from the University of Utah, to his Ph.D. at Johns Hopkins University in Baltimore, Maryland, his postdoctoral research at ETH Zurich in Switzerland, and finally to his present position as the University of Utah.
As a Ph.D. student at John Hopkins University, Jake’s research was on virtual fixtures, which are software tools designed to make telerobotic medical procedures faster and safer. He explains, “Virtual fixtures are comparable to physical fixtures. For instance, take an everyday ruler, which is a physical fixture. You can draw a straight line faster and more accurately using a ruler than you ever could freehand. A virtual fixture provides the same type of assistance to the human operator of a robot, but using software. For example, a virtual fixture can be configured such that the human operator of a medical robot cannot accidentally cut the patient’s artery or nerve.”
Having earned his Ph.D., Dr. Abbott accepted a position as postdoctoral research associate at the Institute of Robotics and Intelligent Systems at ETH Zurich, Switzerland. Being the top technical university in Europe, positions at ETH Zurich are incredibly competitive.
His lab at ETH Zurich exposed Abbott to cutting-edge microrobotics research, where his group was making tiny devices designed to manipulate cells under a microscope and to one day travel through the human body to perform targeted medical therapies. “One of the first things I learned,” says Abbott, “is that our intuition about how things work in our macroworld do not always apply to the microworld. In the macroworld the most effective swimmers are fish and dolphins, but that method of swimming become less and less effective as the swimmer gets smaller and smaller. Bacteria swim using a tiny propeller that’s shaped like a corkscrew. If we want to design effective swimming microrobots, we can learn a lot from nature.”

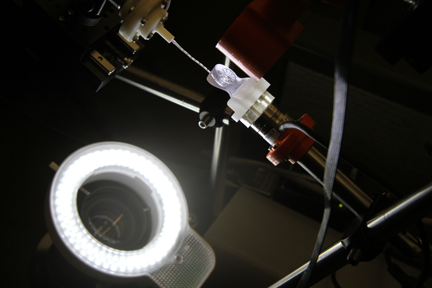
Abbott’s research group at ETH Zurich had the idea to pull a microrobot around inside an eye using magnetics to deliver drugs to the retina. Trusting the math and the physics, they designed and constructed the first system to enable five-degree-of-freedom magnetic control of a wireless levitating device. The system, which comprises eight electromagnets, was named OctoMag. The technology has evolved since Abbott’s original prototype, and is now being commercialized by Aeon Scientific in Switzerland as the Aeon Phocus catheter-steering system for the treatment of cardiac arrhythmias.
After spending three years at ETH Zurich, Dr. Abbott accepted a position as assistant professor at the University of Utah in mechanical engineering. He returned to Utah to synthesize his telerobotics research from Johns Hopkins with his microrobotics and magnetics research from ETH Zurich. He and his students have a number of internationally renowned projects that are working toward the next generation of minimally invasive therapeutic and diagnostic medical systems, and that are pushing the state-of-the-art in magnetic manipulation, with many projects receiving financial support from government and industry.
Manikantan (Mani) Nambi, University of Utah mechanical engineering Ph.D. candidate from Mumbai, India says, “Professor Abbott has played a huge role in my professional development as a graduate student. I have always had the independence to choose my approach to solving research problems under his constant supervision and expertise whenever necessary.”
“Professor Abbott is very patient with students as he thinks from a student’s perspective,” adds Nambi. “He encourages us to take courses that we are interested in, which in my case has enabled me to attend non-mechanical engineering courses in medical device design. As a result, I have been able to take part and win in a medical device design competition organized by the University of Utah Center for Medical Innovation. Under Professor Abbott’s mentorship, my presentation and technical writing skills have improved tremendously, and I have been able to take an active role in developing ideas and writing grant applications which has been a huge learning experience.”
Nambi, expects to receive his Ph.D. December 2014, and from there would like to work in the medical industry developing state-of-the-art robotic surgical systems.
“Dr. Abbott is a collaborative innovator,” says U computing Ph.D. candidate Arthur (Art) Mahoney. “He works with us (his students) to develop new research ideas and let’s us take charge of them. He gives us as much autonomy as we desire but is always ready with help as needed or when roadblocks need to be navigated.”
“I give Professor Abbott a substantial amount of credit for my development as a researcher. My technical skills have grown under his supervision and I have learned to ask the critical questions that lead to successful research. He has a rigorous and methodical way of looking at problems, which I try to emulate. Dr. Abbott is on the leading edge of our field and through teaching via example, he is teaching me as his student to live on the leading edge as well.”
Learn more about Professor Jake Abbott, his research and his students by visiting the Utah Telerobotics Laboratory.
The Department of Mechanical Engineering at the University of Utah is committed to providing students with broad-based, rigorous and progressive education. By combining state-of-the-art facilities with renowned faculty, the department provides an education that gives students the necessary skills to become the next generation of innovators.